Project Overview
Problem:
In my machine engineering class, we were challenged to design and build a remote controlled vehicle capable of picking up different size balls (varying from ping pong balls to soft balls, to a soccer ball, with the larger balls worth more points) and placing them into a tube (one tall and skinny worth 2x points, and one short and fat worth 1x points). All groups were limited to a set parts list containing a limited number of motors and materials.
Solution:
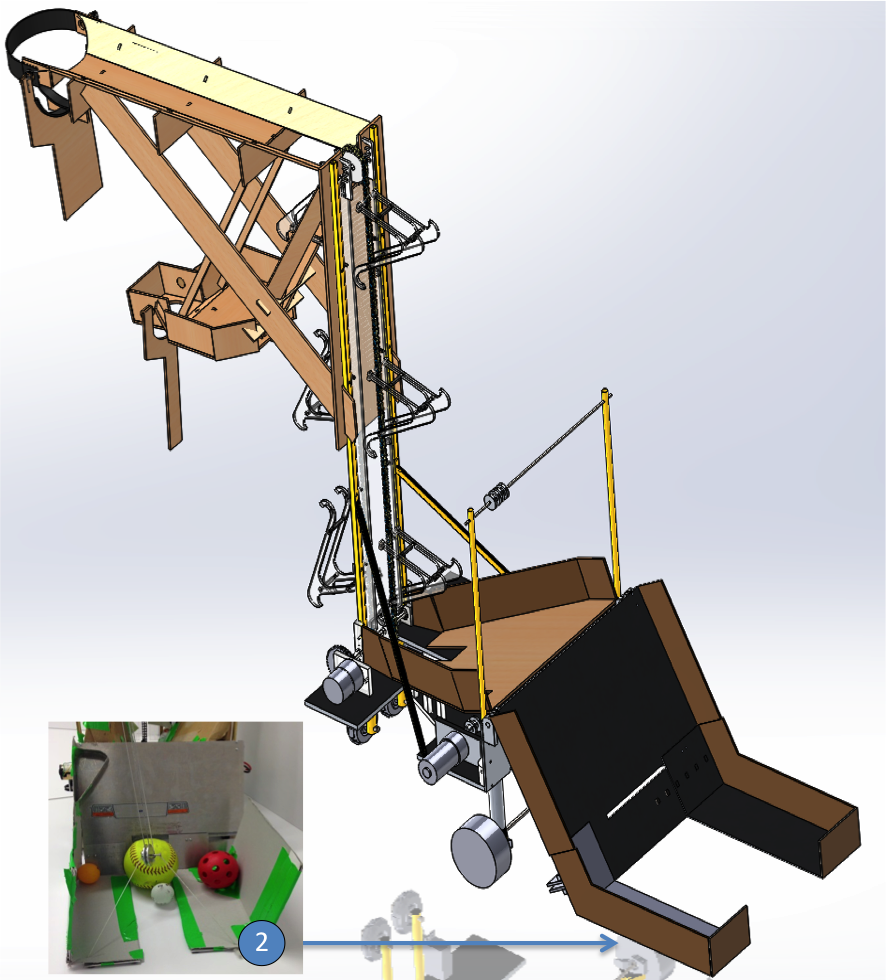
My team of four designed our vehicle to maximize the point values that we could score by being able to pick up all types of balls except the soccer ball. We strived to place all balls in the tall tube, except for placing ping pong balls in the short tube so that they would not take up space in the tall tube. While we aimed to maintain simple and reliable mechanisms, our team’s approach to the problem was ambitious. We ultimately accomplished what we set out to do. Our group was the only group capable of placing any ball in the top tube. We won the competition and received a citation for academic excellence in the class. I was responsible for the collection mechanism, and designed a very simple and reliable rack and pinion assembly to accomplish this. As the team leader, I also controlled the robot in the competition, and was a large contributor to the design and manufacturing of the other subsystems.

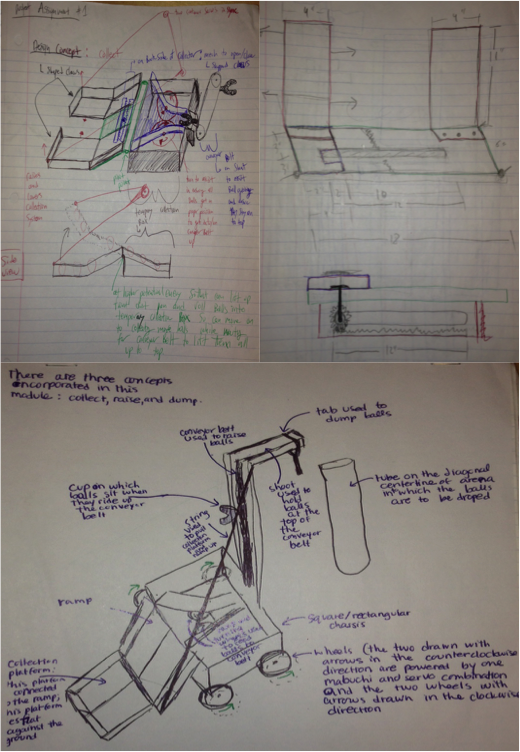
Design Process